Unico prodotto “isolato galvanicamente”, professionale sul mercato mondiale per Arduino e/o similari!!
CAN-ISO è uno shield CAN-BUS (isolato galvanicamente) e permette di interfacciare una scheda Arduino o similare con propri dispositivi e/o commerciali, quali centraline, condizionatori, BMS (sistemi di ricarica), ecc che utilizzano il bus CAN.
Il costo di CAN-ISO (Made in Italy) è di 35 euro (solo shield).
Per informazioni o altro, e-mail: rubinolab(at)gmail dot com
E’ uno shield “professionale” completo di tutte le protezioni hardware con pin-out standard CAN su DB-9 facile da utilizzare.
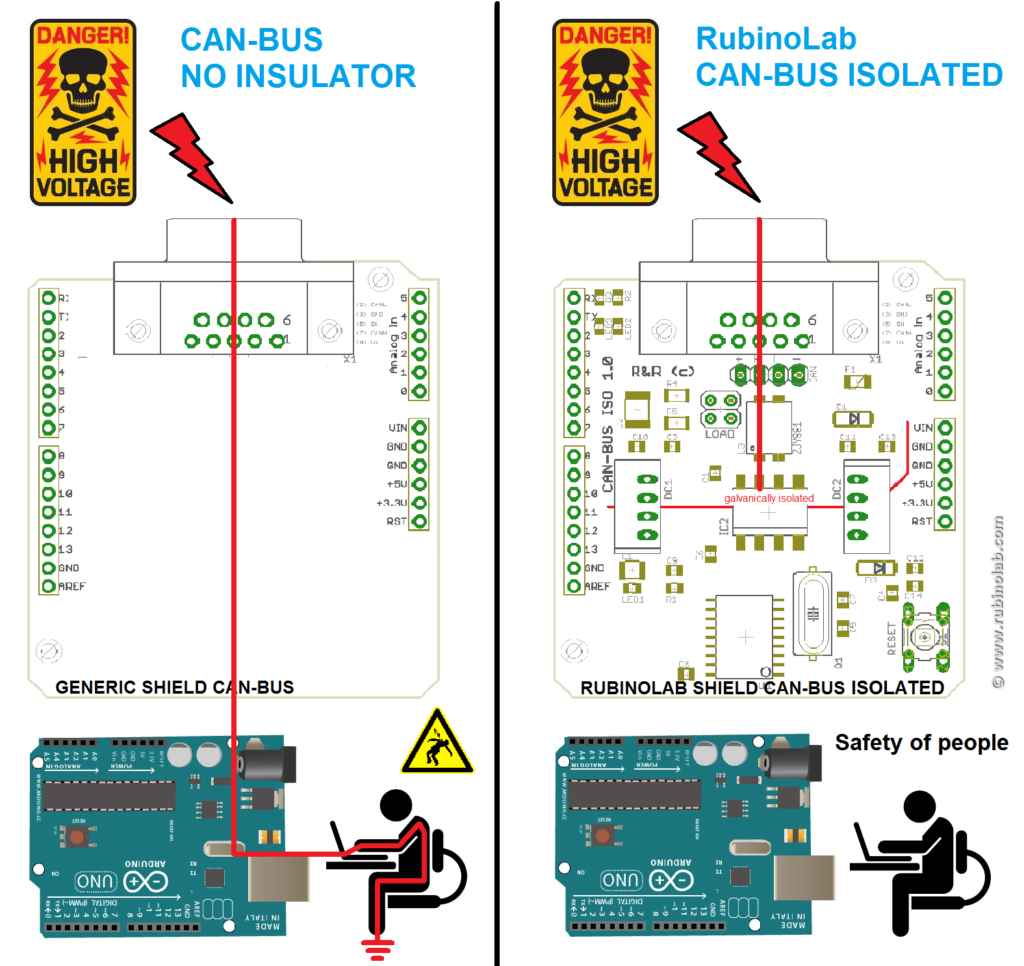
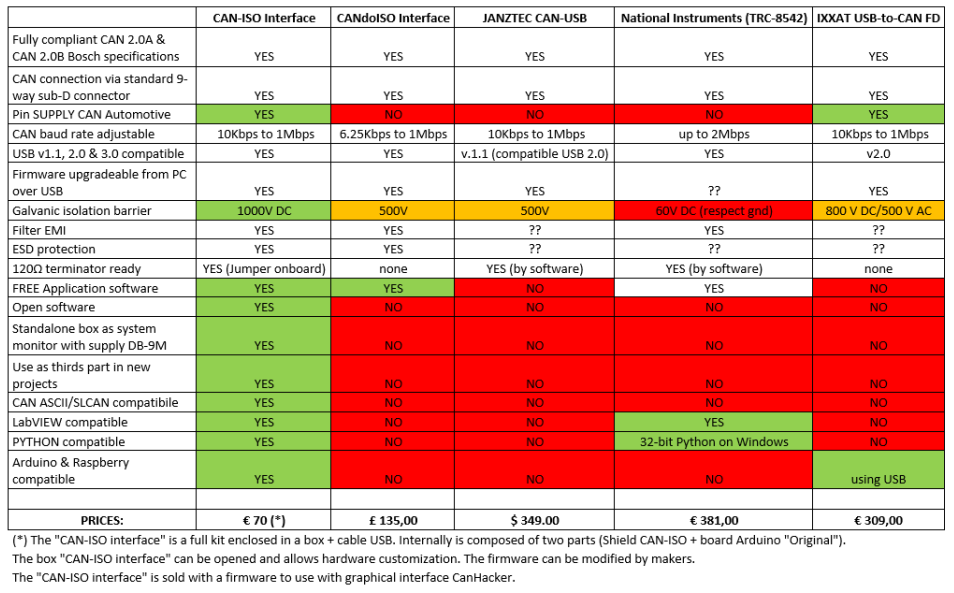
Perché sceglierla rispetto altri prodotti? Principalmente poiché è isolata galvanicamente, di qualità, dalle alte prestazioni, riconfigurabile.
Ma l’isolamento galvanico a cosa serve? Per operare in sicurezza visto che solitamente si lavora su linee CAN con diversi dispositivi collegati. Nel caso di malfunzionamento di un dispositivo CAN (non isolato) per esempio guasto all’alimentatore o dispersioni di tensione che possono verificarsi in un ambiente di lavoro per umidità o pioggia è possibile che sulla linea CAN ci sia una tensione pericolosa per l’utente. In generale in base alla norma tecnica IEC 60479-1 la soglia di tensione minima considerata pericolosa per una persona è di 50Vac (tensione alternata a 50Hz) e 120Vdc (tensione continua). Gli effetti più frequenti e più importanti che la corrente elettrica produce sul corpo umano sono fondamentalmente quattro e bastano decine di milliampere per trovarsi in una delle condizioni: Tetanizzazione (>10-15mA), Arresto della respirazione (20-30mA), Fibrillazione ventricolare (70-100mA), Ustioni (>100mA).
Dove si utilizza? Si può utilizzare in moltissimi campi, per connettere più dispositivi con soli 2 fili twistati (consiglio di utilizzare anche uno schermo). E’ un sistema Real-Time, alla velocità di 1Mbit/s è possibile connettere linee di 40metri, mentre a 10kbit/s linee fino a 6 chilometri.
Riporto alcuni campi di utilizzo:
- Automazione Industriale, Controllo, Sensori, Sistemi di comando a distanza
- OBD II (On Board Diagnostics) Automotive
- Industria 4.0 internet of things
- Automazione di edifici e controllo del clima (HVAC)
- Sistemi di sicurezza
- Mezzi di trasporto
- Sistemi medicali
- Sistemi di telecomunicazioni
- Standards CAN Bus quali: CANopen, DeviceNet, NMEA2000, ARINC825, ISO11783, CAN Kingdom, CANaerospace
Inoltre CAN-ISO è un progetto OPEN Software per i Makers !!!
In questa pagina sono riportati:
- informazioni tecniche per l’uso corretto dello shield
- codici di esempio Open Source
- supporto alla community Open Source
Grazie al supporto della community, questa pagina raccoglierà anche i migliori progetti di Makers, dando alla comunità dei Makers il miglior archivio per i loro progetti sviluppati con questo hardware.
Declinazione di responsabilità: RubinoLAB non può essere considerato responsabile per l’uso improprio del progetto.
Descrizione Tecnica
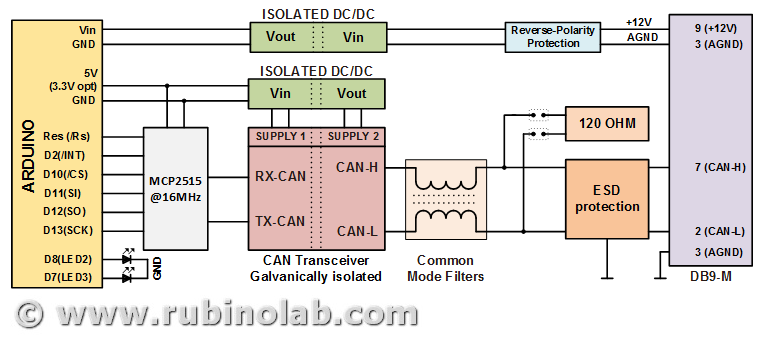
CAN-ISO è uno shield isolato galvanicamente per CAN-BUS, con protezioni e filtri su can-bus per board Arduino o similari.
In combinazione con una board Arduino è un potente strumento per l’invio e la ricezione di comandi, test e analisi delle reti CAN-BUS.
CAN-ISO può essere alimentata da una board Arduino attraverso la USB oppure da una alimentazione esterna a 12V sul connettore DB-9 consentendo di avere una board “standalone”. La scheda sarà sempre isolata sia se alimentata da Arduino che dal connettore DB-9.
Caratteristiche
- Completamente conforme con le specifiche CAN 2.0B Bosch
- ISO 11898-2 (CAN alta velocità) interfaccia fisica
- CAN baud rate configurabile da software fino a 1Mbps
- 1000Vrms isolamento galvanico tra CAN-BUS e board Arduino
- Protezione Fault Bus tra –27 V e 40 V
- Protezione ESD
- Filtro CAN di modo comune (rumore di linea)
- Terminatore di linea CAN da 120 ohm (configurabile)
- MCP2515 @16MHz
- Circuit Operating Voltage: 5V default; 3.3V su richiesta prima dell’acquisto
- Alimentazione isolata tra la board Arduino e il CAN-BUS (il dispositivo previene le il rumore delle correnti parassite sul bus dati o altri circuiti che possono entrare sul piano di massa e interferire o danneggiare i circuiti sensibili)
- Pienamente compatibile con i protocolli ad alto livello quali: CANopen, DeviceNet, NMEA2000, ARINC825, ISO11783, CAN Kingdom, CANaerospace
- Connettore industriale standard DB-9 (possibilità di alimentare da una sorgente esterna a 12V dc)
- Protezione inversione di polarità da sorgente esterna su DB-9
- Indicatori LED
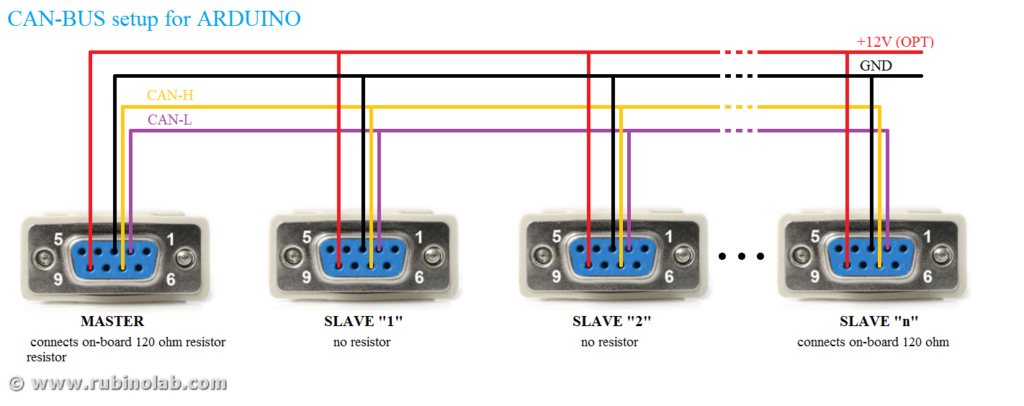
Connessione
Riportiamo le connessioni dello shield “CAN-ISO”. Le etichette in blu sono utilizzate da CAN-ISO.
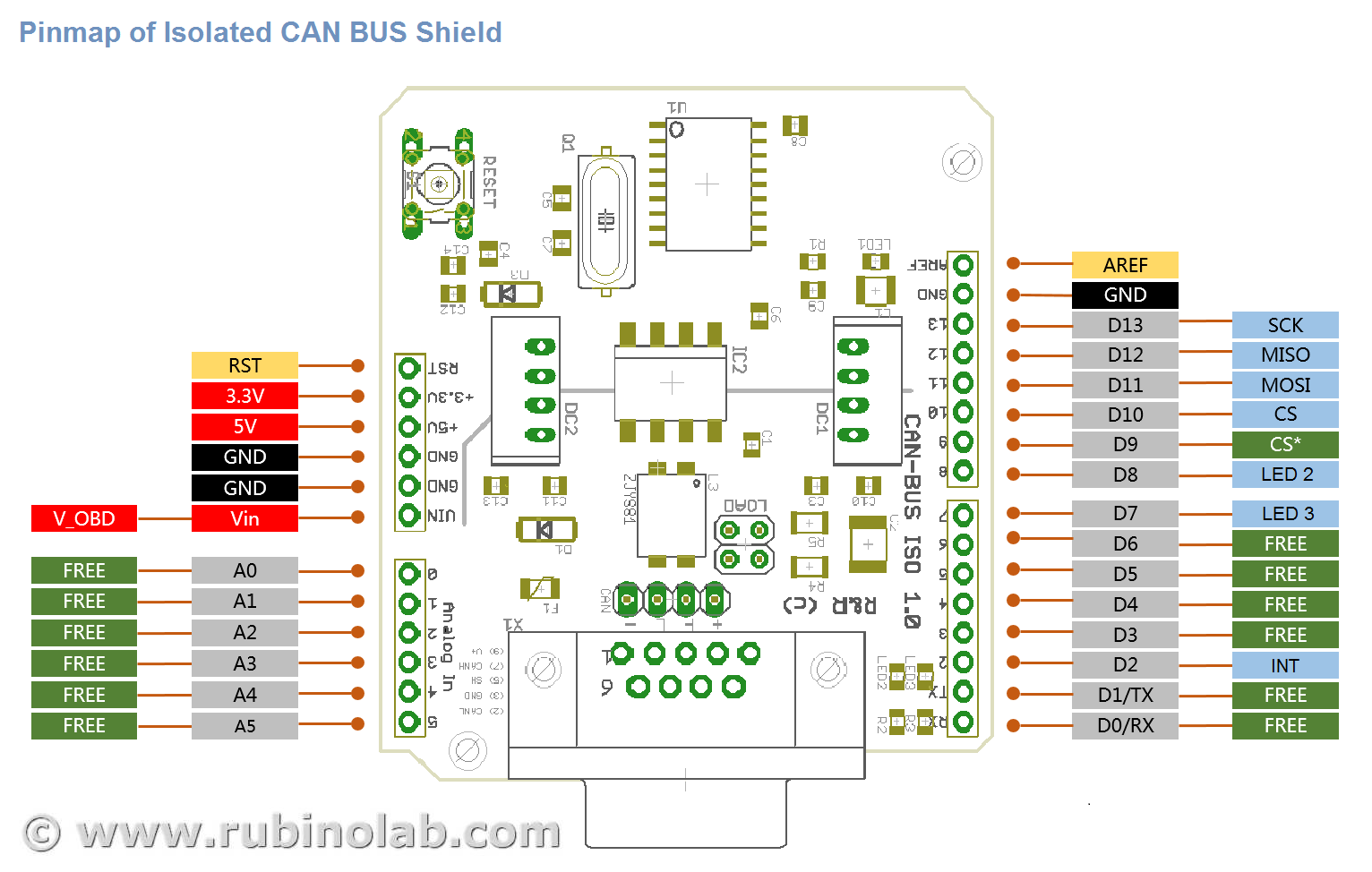
Il clock della board per il chip MCP2515 è 16.00 MHz.
Note :
- Lo shield CAN-ISO ha a bordo un terminatore CAN bus che è possibile inserire/disinserire mediante pinhead
- Il CAN bus deve essere terminato con un solo terminatore a 120 Ohm per cavi piccoli di lunghezza (< 2m)
- Per cavi CAN networks (>10m) & ambienti rumorosi usa cavi con schermo, con fili twistati.
Compatibilità
CAN-ISO Shield è utilizzabile sulle board che lavorano con segnali a 5V (default), fornibile per segnali a 3.3V su richiesta prima dell’acquisto:
| Nome dispositivo | Compatibilità | Note |
| Arduino UNO (ATmega328) | 100% | testato |
| Arduino Mega (ATmega1280/2560) | 100% | da testare |
| Arduino Leonardo (ATmega32U4) | 100% | da testare |
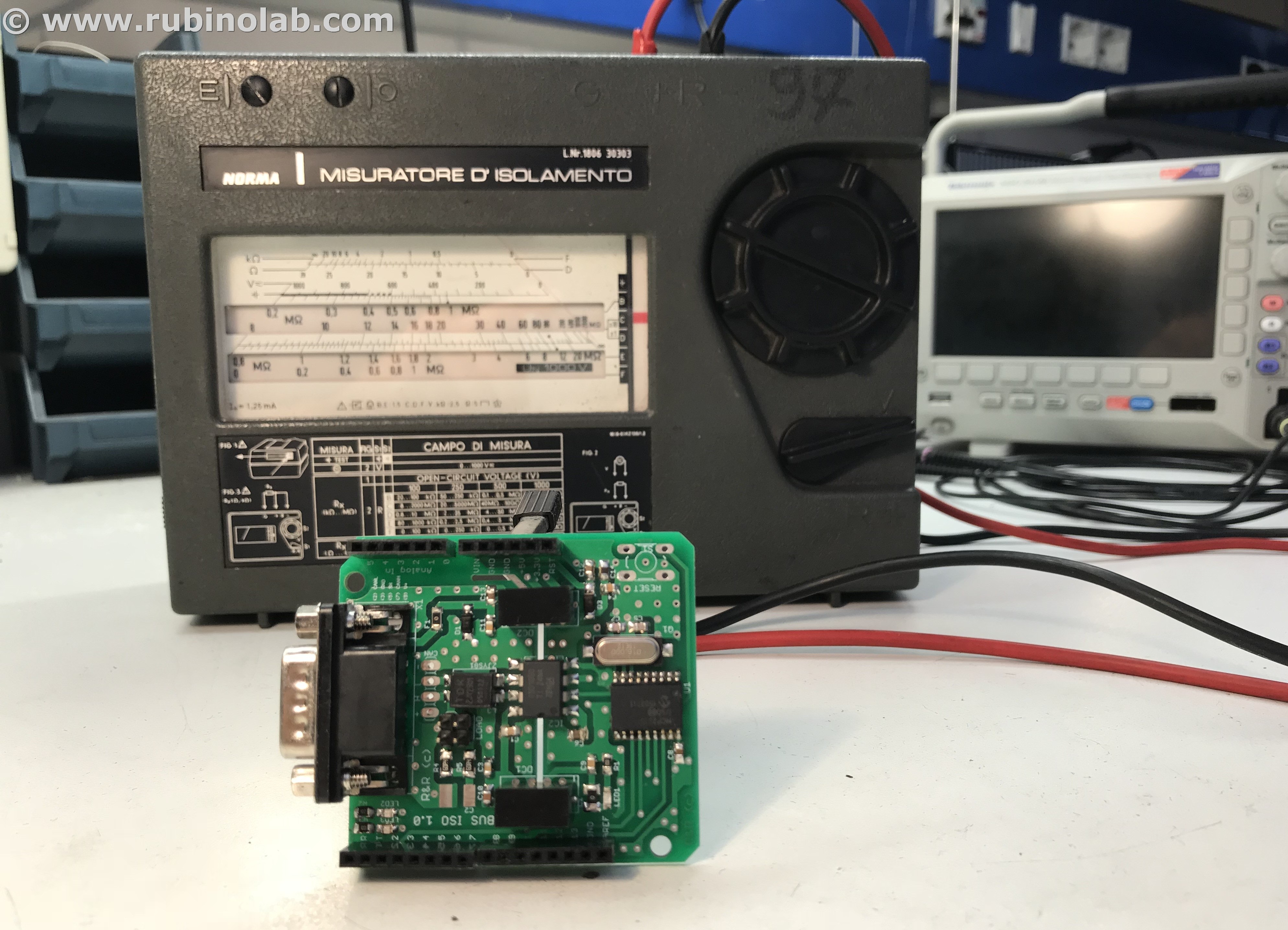
Test
Diversi test di base sono stati condotti per garantire che lo shield lavori in modo appropriato. I tests includono la misurazione della frequenza di clock, la potenza assorbita, le caratteristiche del filtro EMI.
Inoltre sono stati condotti altri specifici test con strumenti dedicati o hardware personalizzato. Questi test includono:
| ISOLAMENTO | fino a 1000 V | Misuratore di isolamento:
NORMA L.Nr.1806 30303 |
| ERRORE DI COMUNICAZIONE | più di 10 ore continue di comunicazione | due shields sono stati utilizzati per un test in loopback |
Lo Shield CAN-ISO ha superato con successo tutti i test menzionati!
On-Board Diagnostics (OBD)
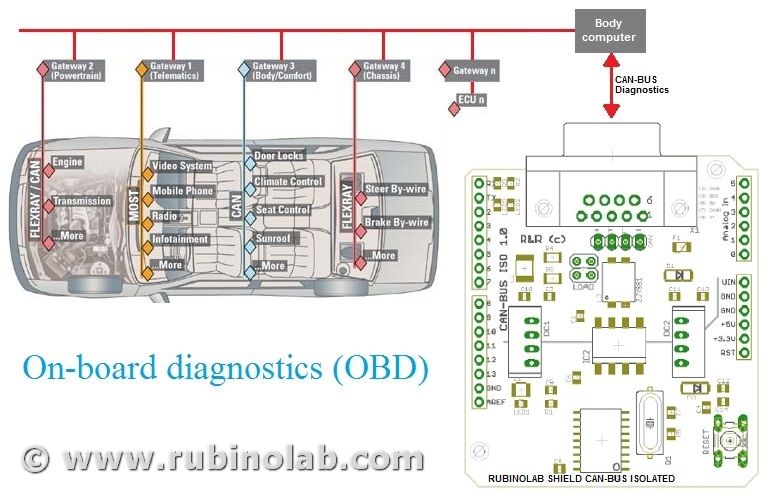
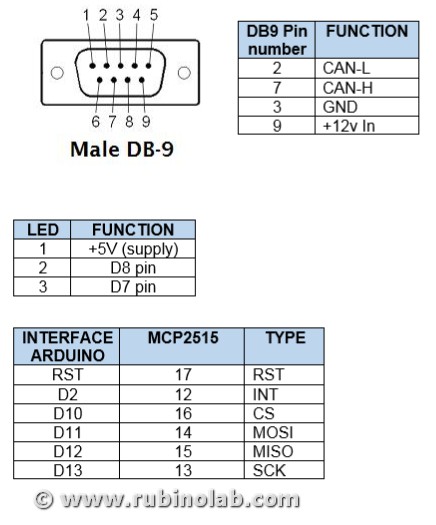
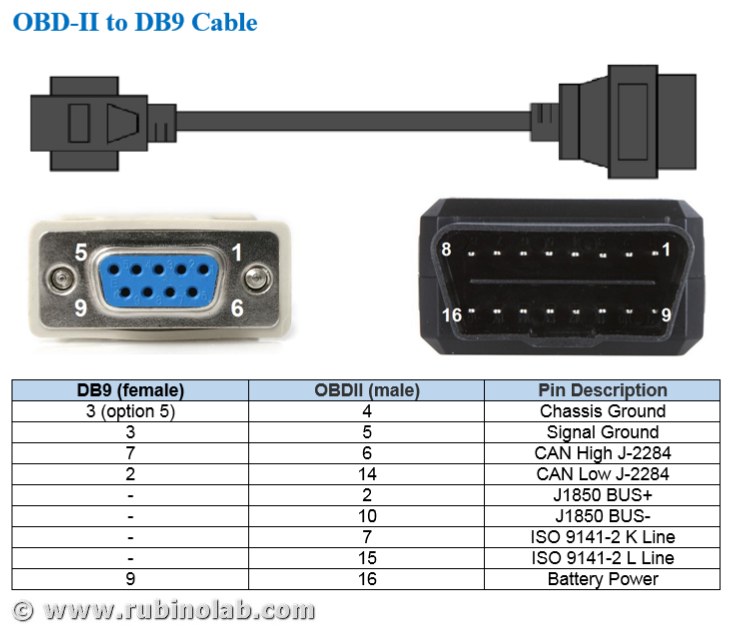
Interfacciare OBD-II con DB9
Questo è la connessione standard per interfacciarsi alla OBD-II per tutti i veicoli in circolazione dal 2008. Per quelli più vecchi o per le auto FORD la piedinatura OBD-II potrebbe variare e dipende dal costruttore auto.
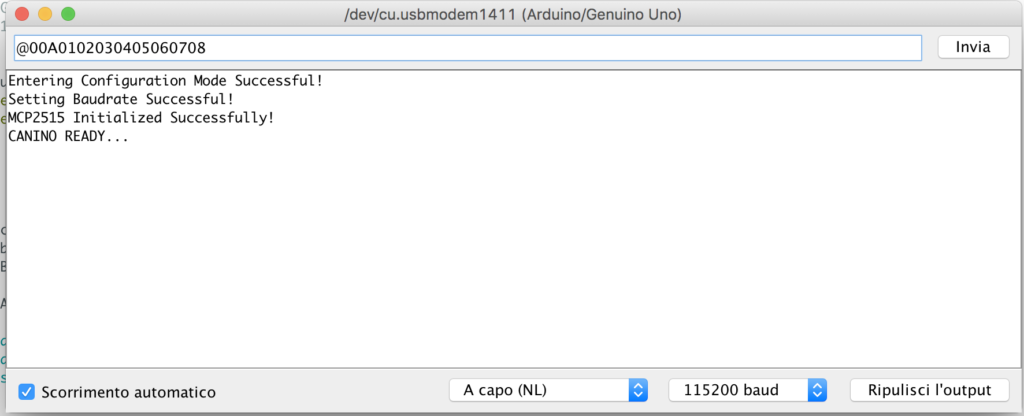
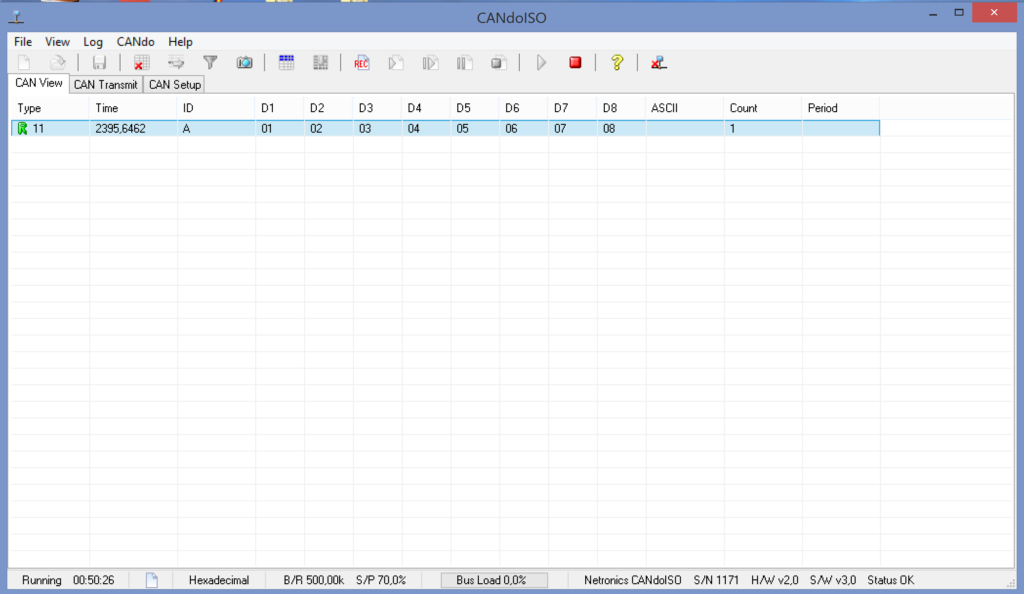
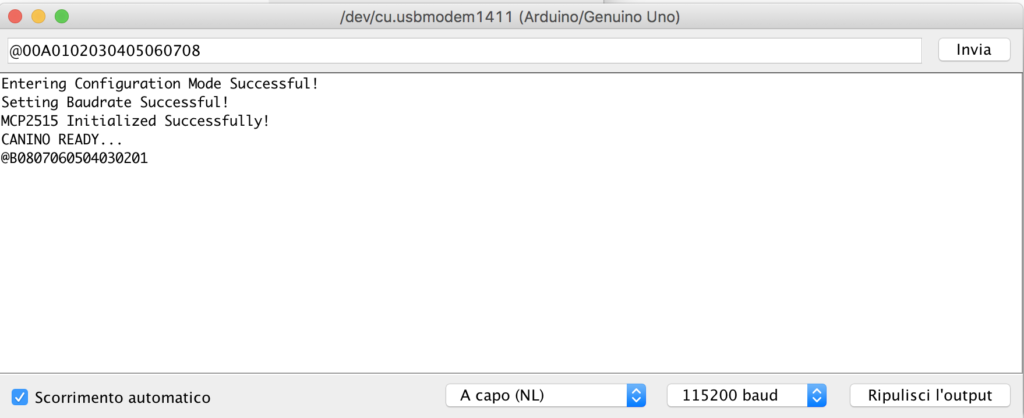
Codice di esempio RubinoLAB
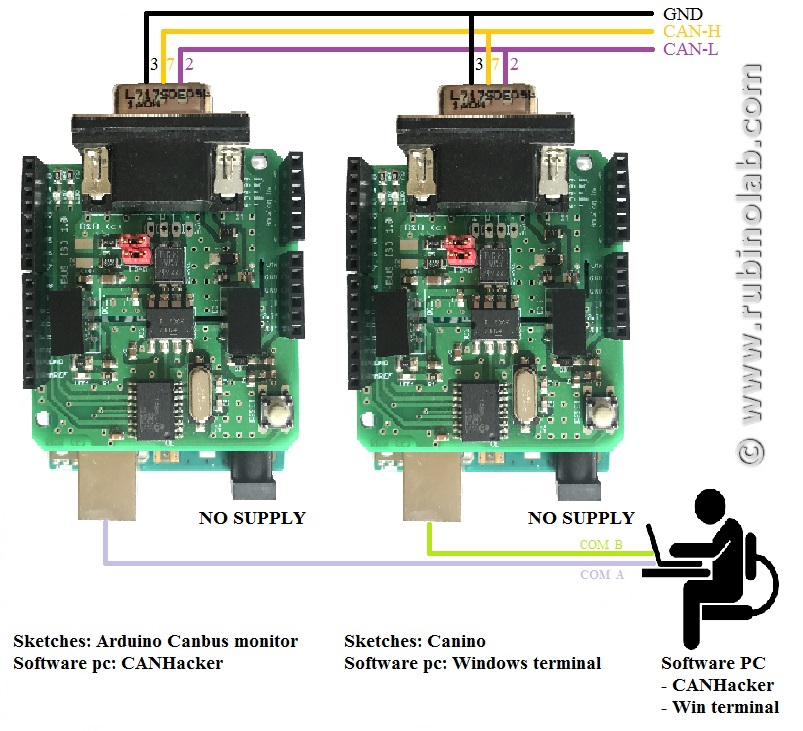
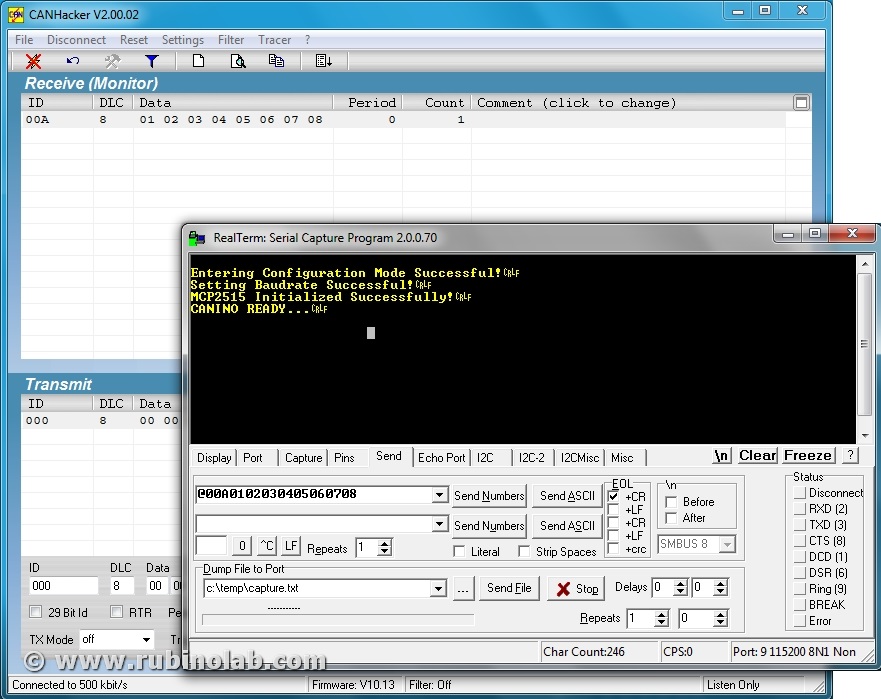
Il primo esempio di codice si chiama “CANINO”. Questo codice trasforma l’hardware Arduino + CAN-ISO in un bridge tra la porta seriale USB e il CAN BUS. I pacchetti sono facilmente leggibili con un programma “serial terminal”, ciò consente di debaggare facilmente le linee o creare una facile interfaccia grafica con LabVIEW, Python, Processing ecc.
Per l’esempio: Configurazione del codice e test CAN-ISO
Un video YouTube dove CAN-ISO dialoga con una centralina CAN BUS, utilizzando il codice “CANINO” e interfaccia grafica “LabView”:
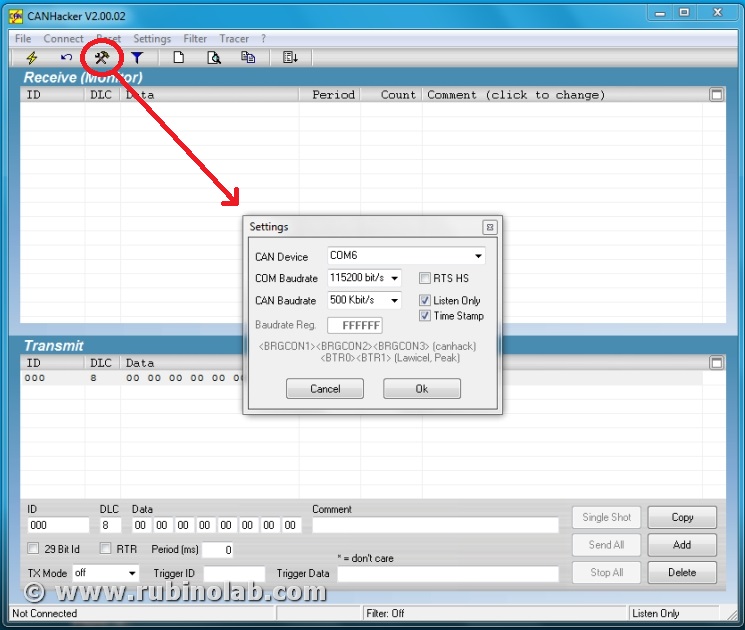
Per l’utilizzo con interfaccia grafica “professionale” vai alla pagina: CANHacker
Maker
Per condividere il tuo progetto realizzato con CAN-ISO, invia una e-mail a: info(at)rubinolab dot com e proponi la tua idea.
Se la tua idea sarà considerata interessante, sarà ospitata nel sito web RubinoLAB o collegata alla nostra pagina.
Dove acquistare
Abbiamo realizzato una prima serie per soddisfare le nostre esigenze e quelle di molti makers, fino ad esaurimento scorte. Nel caso ci sia ulteriore richiesta ci sarà una ulteriore produzione.
Il costo della scheda (Made in Italy) è di 70 euro ora in offerta a 35 euro.
Per informazioni o altro, e-mail: rubinolab(at)gmail dot com
 Il chip CH340 /CH341 viene utilizzato da molte schede compatibili Arduino per fornire la connettività USB.
Il chip CH340 /CH341 viene utilizzato da molte schede compatibili Arduino per fornire la connettività USB.