Con il termine OBD o OBD-II, nel contesto automobilistico, motociclistico o motoristico in generale, è un termine generico che si riferisce alla capacità di autodiagnosi e segnalazione di errori/guasti di un veicolo. Tecnicamente il suo nome è J1962 e in europa è chiamato con il termine EOBD.
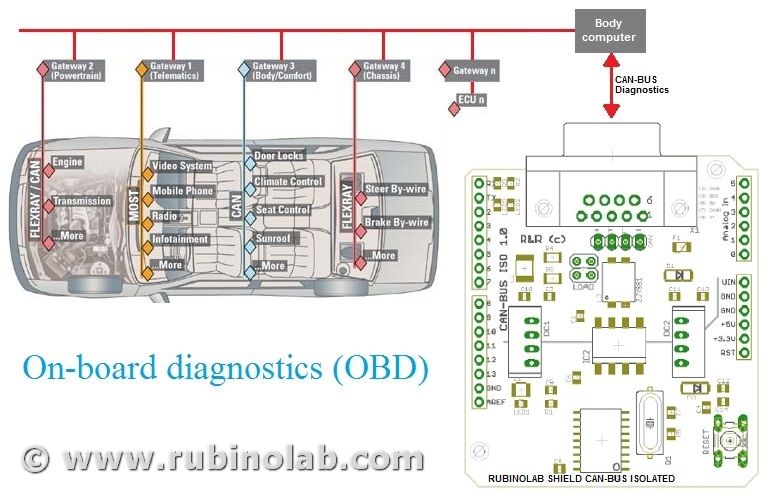
Il protocollo di comunicazione utilizzato per la OBD (On Board Diagnostics) è il CAN (Controller Area Network) che può dialogare con il “Body computer” al quale sono connessi tutti i dispositivi di un veicolo.
E’ fondamentale distinguere i ruoli dei due protocolli CAN e OBD-II.
Il protocollo CAN (controller area network) è un bus seriale di comunicazione digitale di tipo “broadcast”: permette il controllo real-time distribuito con un livello di sicurezza molto elevato. E’ stato introdotto dalla Bosch nei primi anni ‘80 per applicazioni automobilistiche, per consentire cioè la comunicazione fra i dispositivi elettronici intelligenti montati su un autoveicolo, ma ora si è diffuso in molti settori dell’industria. Ma affinché ci sia comunicazione tra i dispositivi CAN occorre che i dati ricevuti siano identificati univocamente e di conseguenza è stato introdotto l’OBD. Il protocollo OBD-II, molto più dettagliato del CAN, è nato espressamente come standard per i mezzi di trasporto ed è diventato obbligatorio in America nei veicoli prodotti a partire dal 1996. La versione europea di questo standard si chiama EOBD, esso è sostanzialmente identico all’OBD-II ed è obbligatorio dal 2001.
L’OBD-II non definisce solo lo standard di comunicazione, ma anche il connettore che deve essere presente nell’abitacolo del veicolo per il collegamento degli strumenti OBD-II compatibili. Tale connettore è sostanzialmente una porta di collegamento al bus CAN (o altro bus presente sul veicolo). Quando a questo connettore viene collegato a uno strumento con interfaccia OBD-II esso viene praticamente collegato al bus CAN ed è in grado di fare due cose:
- “lettura” in modo passivo di tutti i messaggi che le centraline inviano sul bus e trasmetterli al computer (o altro dispositivo) dell’utente.
- “scrittura” in modo attivo con le centraline, richiedendo dei dati e poi trasmettere al computer (o altro dispositivo) le risposte ricevute.
Come tutti i sistemi attivi, è possibile inviare comandi per modificare i parametri di funzionamento è consigliabile quindi limitarsi ad inviare i messaggi di cui si conosce l’effetto, perché messaggi diversi potrebbero alterare il funzionamento dell’auto e ciò può costituire un pericolo.
Il connettore OBD-II prevede anche una linea che fornisce energia al dispositivo collegato. È importante sapere che il connettore in molti veicoli fornisce sempre energia, anche quando è spento e uno strumento di diagnostica sempre collegato al veicolo (anche a motore spento) potrebbe far scaricare la batteria poiché mantiene sempre attive le centraline che non vanno in Energy Saver. Per questi motivi è consigliato scollegare dopo ogni utilizzo il connettore di diagnostica per preservare la carica della batteria del veicolo.
OBD-II
Lo standard OBD-II definisce inoltre alcuni comandi per il controllo dell’output, le modalità di autocontrollo e per l’azzeramento della memoria KAM (Keep Alive Memory).
Il connettore OBD-II è identico per tutti i modelli ma esistono cinque differenti protocolli di comunicazione:
- VPW (Variable pulse width): General Motors
- PWM (Pulse-width modulation): Ford
- ISO 9141: Chrysler in Asia ed Europa
- ISO 14230 KWP2000 (Keyword Protocol 2000 su linea K)
- ISO 15765 (tramite linea CAN, come SAE-J2284)
Inoltre fornisce le informazioni su tutti i parametri e gli errori rilevanti ai fini delle emissioni inquinanti:
- Codici dei parametri (RLI):
- Velocità
- Giri al minuto
- Codici degli errori (DTC):
- Sensore dell’ossigeno
La lettura dei componenti di errore è standardizzata, quindi qualsiasi officina anche non munita dello strumento ufficiale della casa, deve poter leggere gli errori OBD.
Note: Per i motori benzina ante 2001, anziché di OBD-II si parla di OBD-I, cioè una diagnosi a bordo relativa ai soli errori elettrici.
La normativa EOBD European On Board Diagnostics (European On Board Diagnostics) è l’equivalente europeo dell’OBD-II ed è stata introdotta per i motori a benzina nel 2001 assieme al livello di emissioni Euro 3 con la direttiva 98/69/CE[1].
La EOBD si applica a tutte le autovetture di categoria M1 (con non più di 8 posti a sedere e un peso lordo del veicolo fino a 2.500 kg) immatricolate per la prima volta all’interno degli Stati membri dell’UE a partire dal 1º gennaio 2001 per le autovetture con motore a benzina e dal 1º gennaio 2004 per le autovetture con motore a gasolio. Per i modelli di nuova introduzione, le date di applicazione della normativa sono state anticipate di un anno: 1º gennaio 2000 per le autovetture a benzina e 1º gennaio 2003 per le autovetture a gasolio.
Per le autovetture con un peso lordo del veicolo superiore a 2500 kg e per i veicoli commerciali leggeri, le date di applicazione della normativa sono partite dal 1º gennaio 2002 per i modelli a benzina, e dal 1º gennaio 2007 per i modelli a gasolio.
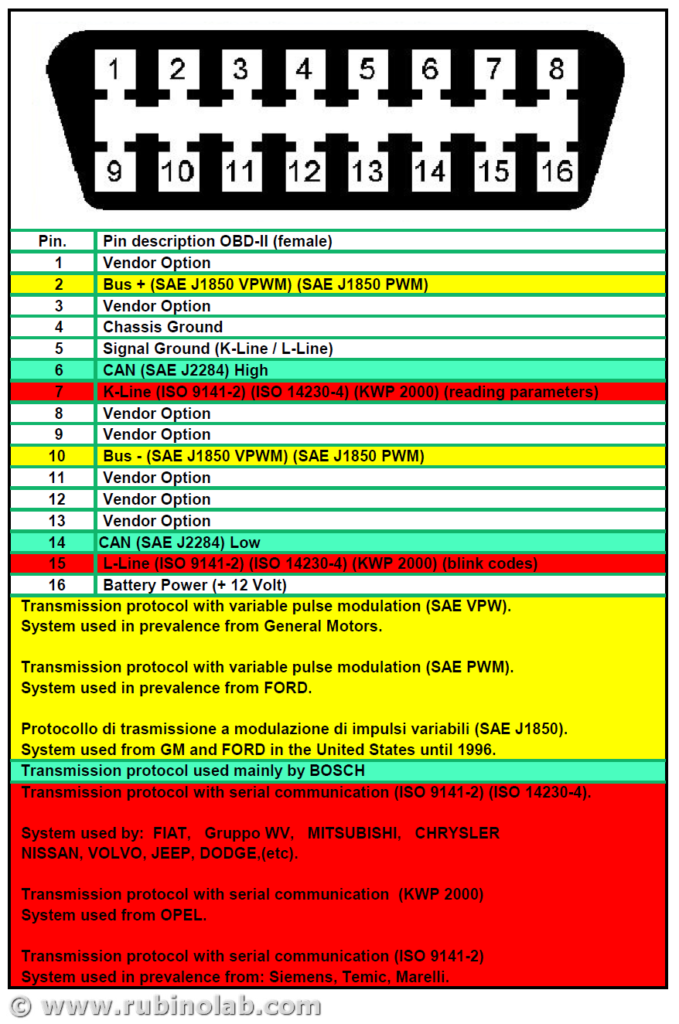
Nota: Se nella presa EOBD2 è presente il contatto del pin 15, è possibile eseguire la procedura per la lettura dei codici errori.
Collegare il pin 15 (se presente) con il pin 5 di massa e tramite la spia diagnosi e la lista codici errori identificare il codice errore in memoria.
Su alcune autovetture il codice lampeggio è disponibile sul pin 13.
EOBD-II – Codici Guasto
I codici di guasto EOBD European On Board Diagnostics sono composti da cinque caratteri: una lettera, seguita da quattro numeri.
La lettera si riferisce al sistema che fa riferimento interrogato (es.. Pxxxx rimanda al sistema di propulsione) mentre se il carattere successivo è un 0 indica la conformità allo standard EOBD European On Board Diagnostics, se è un numero diverso rientra nella tabella codici proprietari del costruttore e può variare a seconda del sistema diagnosticato. Il terzo carattere fa riferimento ad un sottosistema, ad es:
- P00xx – Misurazione carburante e aspirazione aria, controllo emissioni ausiliarie.
- P01xx – Misurazione carburante e aspirazione aria
- P02xx – Misurazione carburante e aspirazione aria (sistema di iniezione).
- P03xx – Controllo iniezione e mancate accensioni.
- P04xx – Controllo emissioni ausiliarie.
- P05xx – Controllo velocità veicolo e sistema di regolazione minimo motore.
- P06xx – Controllo sistema di comunicazione centralina.
- P07xx – Controllo sistema di trasmissione.
- P08xx – Controllo sistema di trasmissione.
Per la tabella completa dei codici: OBD II Standard Fault Codes
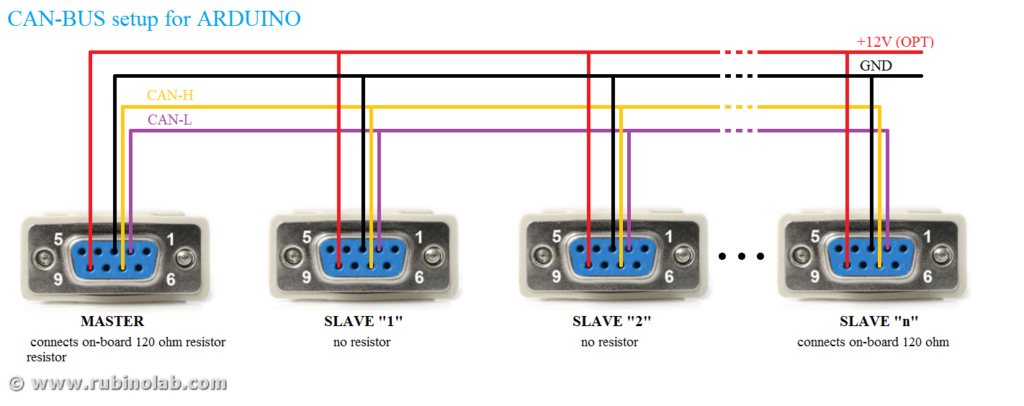
Adesso prendiamo la CAN-BUS ISO e prepariamo il cavo di collegamento per la lettura dei valori su EOBD!
Enjoy!